Engenheiros criam lagarto robótico para explorar a superfície de Marte
Dotado de uma coluna vertebral e quatro patas, o robô superou todas as provas de simulação em superfícies semelhantes ao terreno marciano
Engenheiros chineses desenvolveram um robô de quatro patas projetado para explorar a superfície de Marte. O dispositivo possui uma estrutura de corpo flexível, capaz de replicar o movimento e o estilo de locomoção rasteira de um lagarto do deserto. Ele seria capaz de contornar a dificuldade que os atuais veículos exploratórios enfrentam ao se movimentar sobre terrenos granulares macios ou escalar rochas na superfície marciana.
Movimentos reptilianos
Para desenvolver cada um dos componentes do lagarto robótico, os pesquisadores utilizaram uma série de cálculos para replicar os movimentos dos lagartos. De acordo com os cientistas, a estrutura das patas utiliza um mecanismo de quatro elos, o que garante um movimento de elevação constante, sem perder o equilíbrio. Já o pé é composto por um tornozelo ativo e uma almofada redonda com quatro dedos flexíveis que são eficazes para agarrar pisos e pedras.
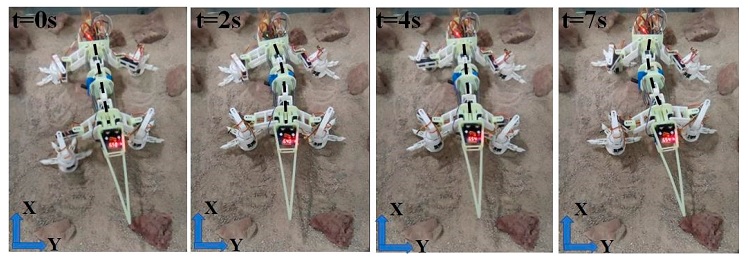
O protótipo foi impresso em 3D e equipado com um servo motor (dispositivo eletromecânico utilizado para movimentar um objeto com precisão), uma bateria de lítio e outros componentes eletrônicos. Por meio de uma simulação de superfícies rochosas semelhantes ao terreno marciano, os pesquisadores colocaram à prova os movimentos do robô. Um estudo detalhando o projeto foi publicado na revista científica Biomimetics.
Os resultados dos testes foram promissores. Segundo os pesquisadores, o robô provou estar à altura dos desafios apresentados pela superfície inóspita de Marte, cruzando o terreno simulado com facilidade. O próximo passo do projeto é buscar novos modelos de aprendizado de máquina que possam ajudar o equipamento a se adaptar sozinho ao terreno marciano.
Fontes
Futurism.com
Imagens
iStock