Agência Espacial Europeia desenvolve cachorro-robô para explorar a Lua
Batizado de LEAP, o equipamento deve investigar áreas de difícil acesso da superfície lunar
Depois de terem sido deixadas de lado por mais de 50 anos, as viagens à Lua estão prestes a serem retomadas. Atualmente, a NASA executa os últimos preparativos da Missão Artemis, que deve voltar a levar humanos ao solo lunar antes do fim desta década. Mesmo que ainda não tenha missões tripuladas planejadas, a Agência Espacial Europeia (ESA) também está trabalhando em projetos nesse sentido, incluindo o desenvolvimento de cachorros-robôs que devem auxiliar a explorar o satélite natural da Terra.
Adaptação ao ambiente lunar
O projeto de desenvolvimento do cachorro-robô é batizado de LEAP (sigla em inglês para "Legged Exploration of the Aristarcus Plateau", ou Exploração com Pernas do Planalto de Aristarco, em tradução livre). Aristarco é uma das regiões lunares que a ESA espera explorar em breve. A equipe do LEAP está trabalhando para que o robô seja integrado ao European Large Logistic Lander (EL3), módulo de pouso que está programado para visitar a Lua várias vezes do final dos anos 2020 ao início dos anos 2030.

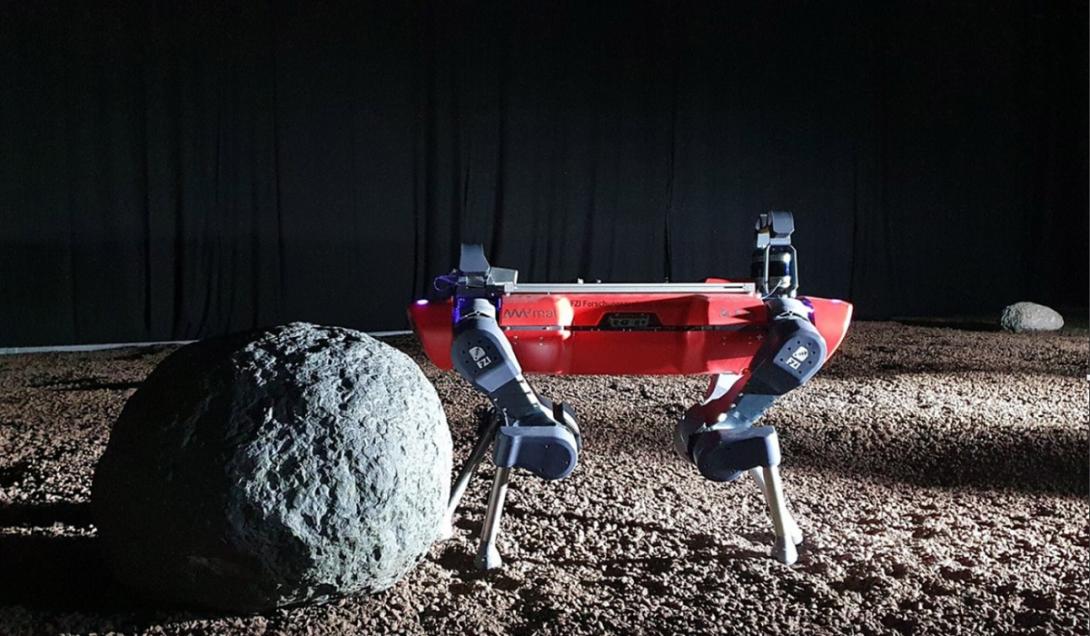
Atualmente, o LEAP está adaptado ao ambiente lunar por um consórcio entre o Instituto Max Planck para Pesquisa do Sistema Solar, na Alemanha, e outras instituições. O protótipo pesa menos de 50 kg, sendo capaz de transportar sensores multiespectrais, radar de penetração no solo, espectrômetros de massa, gravímetros e outros instrumentos. Inicialmente, o robô está sendo treinado em um ambiente virtual para simular as propriedades do terreno, gravidade e poeira lunar.
“O alvo do LEAP é o planalto de Aristarco, uma região da Lua que é particularmente rica em características geológicas, mas altamente difícil de acessar”, disse Patrick Bambach, do Instituto Max Planck para Pesquisa do Sistema Solar. Esse pequeno animal robótico dotado de inteligência artificial teria a capacidade de se deslocar de diferentes formas, o que seria de grande utilidade para cobrir grandes distâncias em um curto período de tempo. Além disso, teria a função de escalar encostas íngremes, implantar instrumentos científicos e cavar o solo para coletar amostras.
Fontes
Europlanet Science Congress
Imagens
ETH Zürich/Robotics Systems Labs (RSL)/Divulgação